Feedback Loop Controller
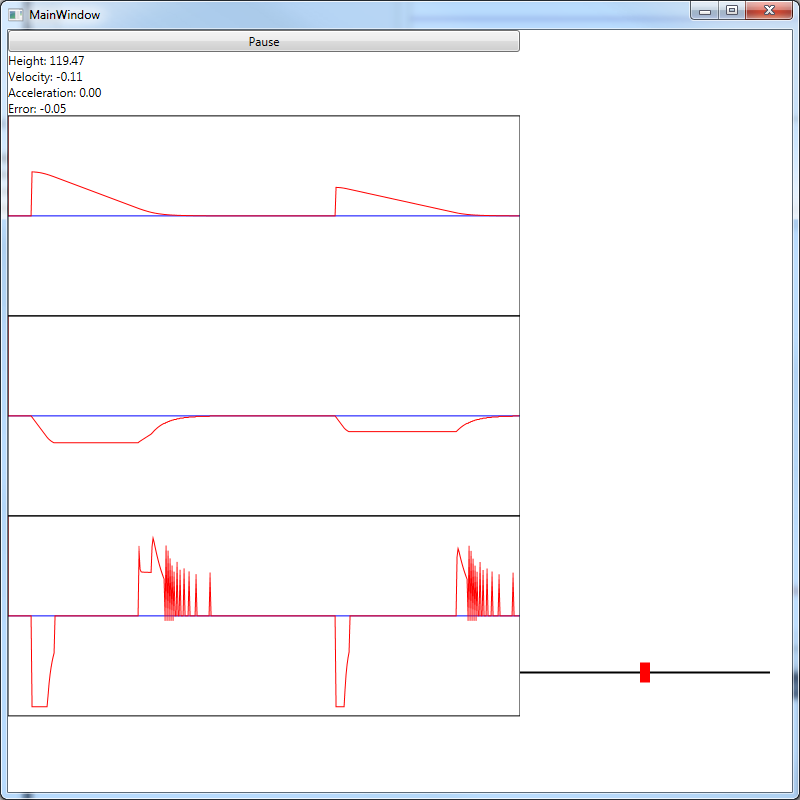
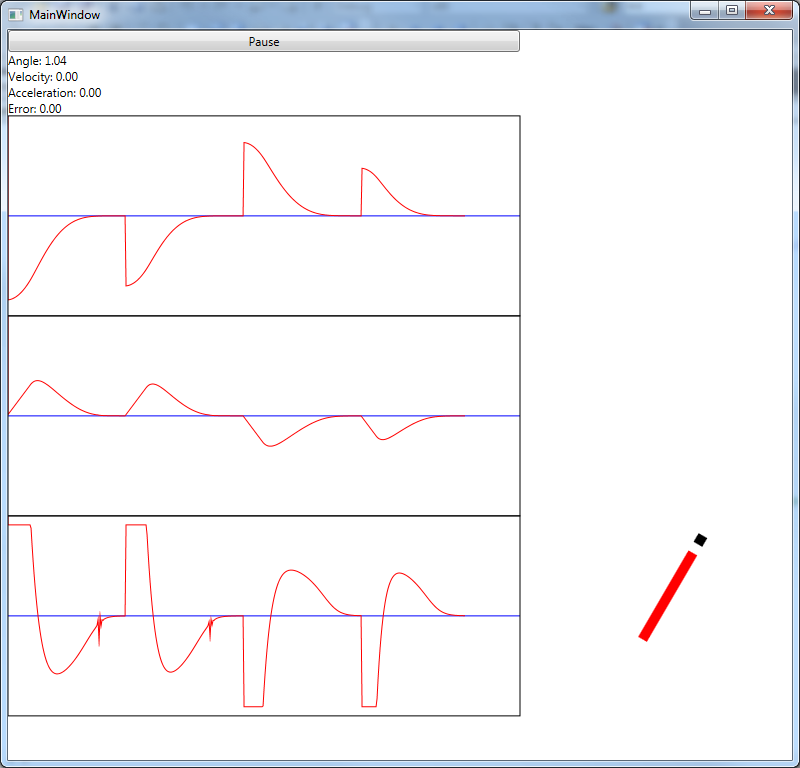
This project was created in WPF to have an object follow a random target location using a feedback loop controller. A linear scenario was designed where an object moves in one dimension to a target location as well as an angular scenario where an object must rotate to point in a target direction. A controller was designed to have the target location satisfied within a specified time while being constrained to a maximum acceleration. This was achieved by using the error and relative velocity to the target to control the acceleration. A graphing control was also implemented to illustrate the position, velocity and acceleration.
The results appear to resemble that of a second order ordinary differential equation found when analyzing harmonic oscillators and RLC circuits. The difficulty comes in preventing under damped and over damped responses while being constrained to a maximum acceleration.
Linear and Angular Scenario
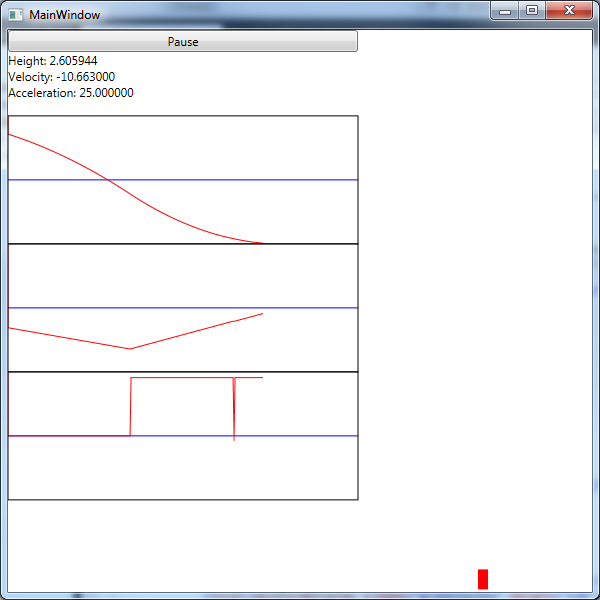
Spacecraft Autopilot
A final scenario was created to implement an autopilot system to land a spacecraft onto the ground. This was accomplished by calculating the acceleration needed to land softly and firing the engines when an almost maximum thrust is needed.